Daniel
Daniel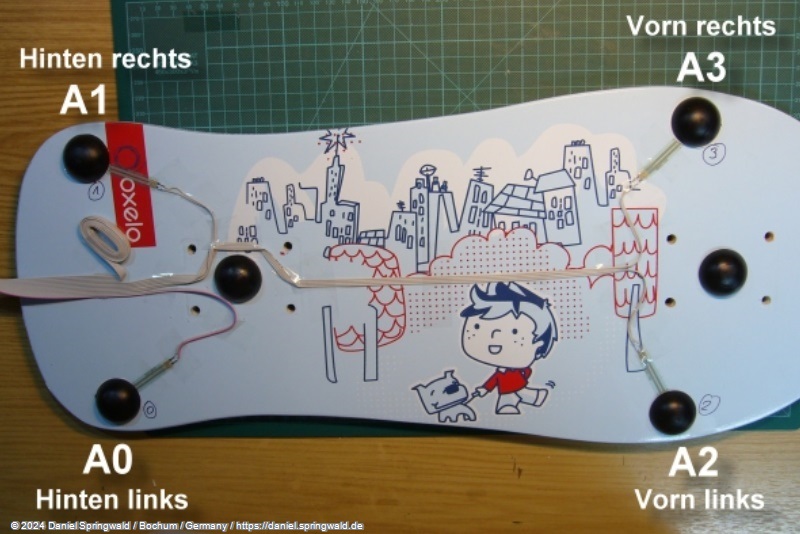
Zur Steuerung eines Video-Spieles ist dieser Skateboard-Controller entstanden.
Es ist nur ein Prototyp und daher nicht sonderlich robust, funktioniert aber technisch einwandfrei.
Als Basis habe ich ein preiswertes Skateboard aus dem Sportgeschäft erstanden:

Von unten sieht es so aus...

Da der spätere Controller fixiert und unbeweglich sein soll, mussten zuerst die Räder entfernt werden:

Bei diesem Prototyp wird sämtliches Gewicht des Spielers durch Tür-Buffer aus Gummi aus dem Baumarkt aufgenommen...

...die auf einer Seite über eine Klebefläche verfügen. Leider sind diese in der Mitte hohl, was für die Verwendung der Drucksensoren nicht ganz optimal ist - doch dazu später mehr...

Da die Mitte des Skateboards nicht relevant für die Richtungsmessung ist (und damit die Drucksensoren später nicht das komplette Gewicht des Spielers verarbeiten müssen), können zwei der Gummi-Buffer direkt in die Mitte des Boards geklebt werden:

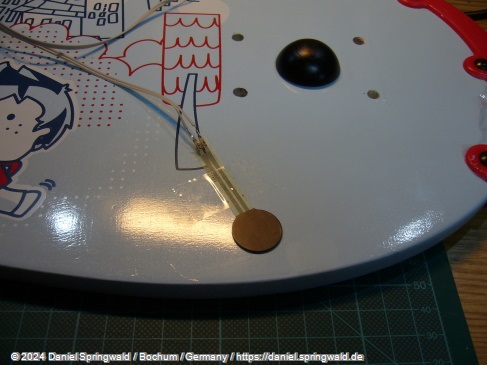
In den vier Ecken des Skateboards wird nun jeweils ein Drucksensor angebracht.
Ich habe mich bei diesem Prototyp für einen 12,7mm großen Sensor entschieden, welcher für den Messbereich von 100g bis 10kg optimiert und mit unter 10,- EUR noch relativ günstig ist.

Nachdem an die Sensoren jeweils ein zweipoliges Kabel angelötet ist, können diese grob auf dem Board fixiert werden.

Jetzt kommt die kleine Problematik mit den hohlen Gummi-Buffern. Diese habe ich mit jeweils einer kleinen Portion Heißkleber gelöst.
Vorher wurde natürlich die ursprüngliche Klebeschicht entfernt.
Wichtig ist dabei, dass die Oberfläche in etwa plan ist:

Die so vorbereiteten Buffer benötigen nun wieder eine Klebefläche. Dazu verwende ich hier einfach doppelseitiges Klebeband:


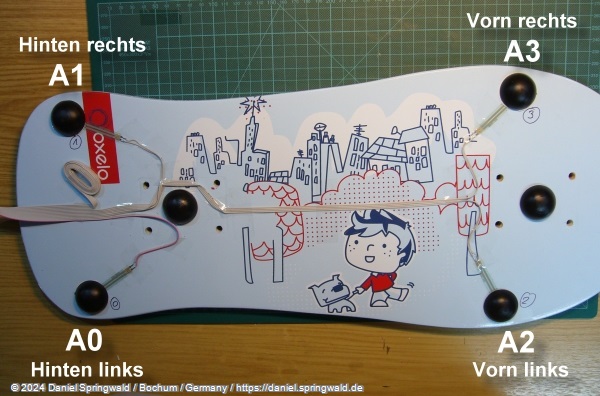
Nun kann auf die vier Sensoren jeweils ein Gummi-Buffer aufgeklebt werden:

Die Verkabelung zum Arduino-Board wird später auf die analogen Eingänge A0 bis A3 geführt.
Hier die Kabel-Belegung:
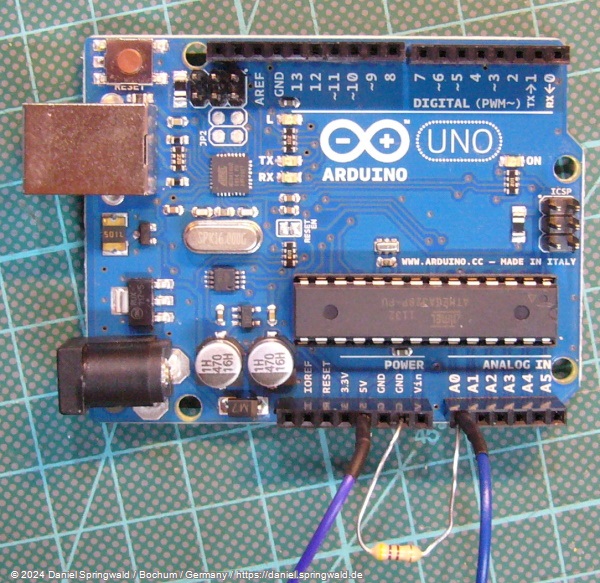
Als Controller wird hier ein Arduino Uno Rev 3 verwendet.
Die Drucksensoren werden nun mit jeweils einem Anschluss an den 5V Port des Arduino und mit dem anderen Anschluss an einen analogen Ausgang (A0-A3) angeschlossen.
Gleichzeitig muss noch ein Widerstand zwischen dem jeweiligen analogen Port und dem GND Port des Arduino angeschlossen werden. Ich habe hier 470 Ohm verwendet, was vom späteren Messergebnis her prima funktioniert.
Als Versuchsaufbau für einen einzelnen Drucksensor sieht das dann so aus (die blauen Kabel führen zum Drucksensor):
Um das Ganze für die vier Sensoren etwas stabiler und übersichtlicher auszulegen, habe ich die Verkabelung und die Widerstände in Form eines Shields an entsprechende Kontaktleisten und eine Platine angelötet:
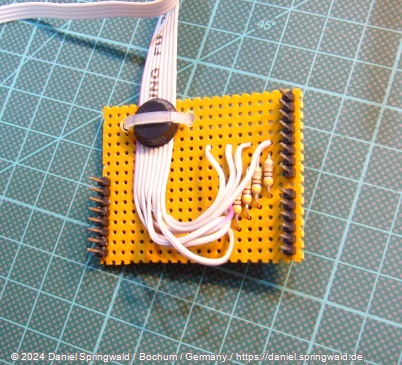
Das Shield lässt sich nun auf den Arduino aufstecken.
Damit ist der Hardwareteil erfolgreich abgeschlossen. Ein kleiner Test mit einem Arduino-Programm, welches über den seriellen Port die vier Messwerte sendet, war erfolgreich und zeigt entsprechend der Gewichtsverlagerung auf dem Skateboard entsprechende Messwerte an.
Am Ende muss das Skateboard nur noch auf einer Untergrund-Platte fixiert werden (hier nicht als Foto zu sehen). Dabei verwende ich die bereits vorhandenen 8 Löcher, an welchem früher die Rollen befestigt waren. Die Schrauben sollten nur so fest angezogen werden, dass das Board gut auf den Gummi-Buffern fixiert ist, aber dennoch noch nicht zu viel Druck auf diese ausübt.