Daniel
Daniel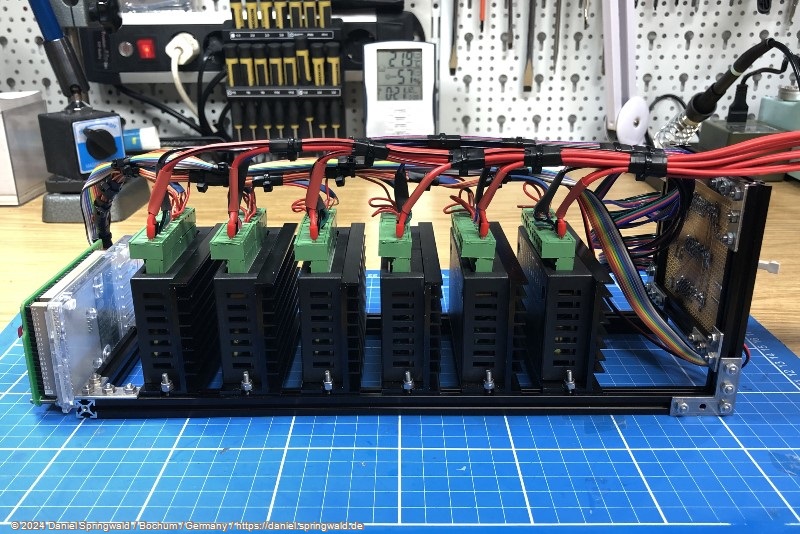
Ich beschäftige mich ja schon seit einigen Jahren mit der Restauration von Cobra RS Roboter Armen der Firma Sekuria aus den 1980er Jahren. Dabei habe ich auch den einen oder anderen Defekt bei den Controller Boxen reparieren können.
Grundsätzlich funktionieren die Boxen jetzt, vor allem geeignet für die manuellen Programmierung per Teach-Box.
Sie haben aber deutliche Einschränkungen bei der Steuerung per seriellem Signal. Das größte Manko ist aus meiner Sicht, dass man während einer Bewegung nicht mehr kontrollierend eingreifen kann.
Das zweite Problem ist einfach die schiere Größe und das Gewicht der Controller Box. In den 1980er Jahren waren die elektronischen Bauteile halt noch deutlich größer.
Jetzt habe ich daher den Schritt gewagt, eine eigene Controller Box auf Basis aktueller Technik komplett neu zu konstruieren.
Eine eigene Controller Box
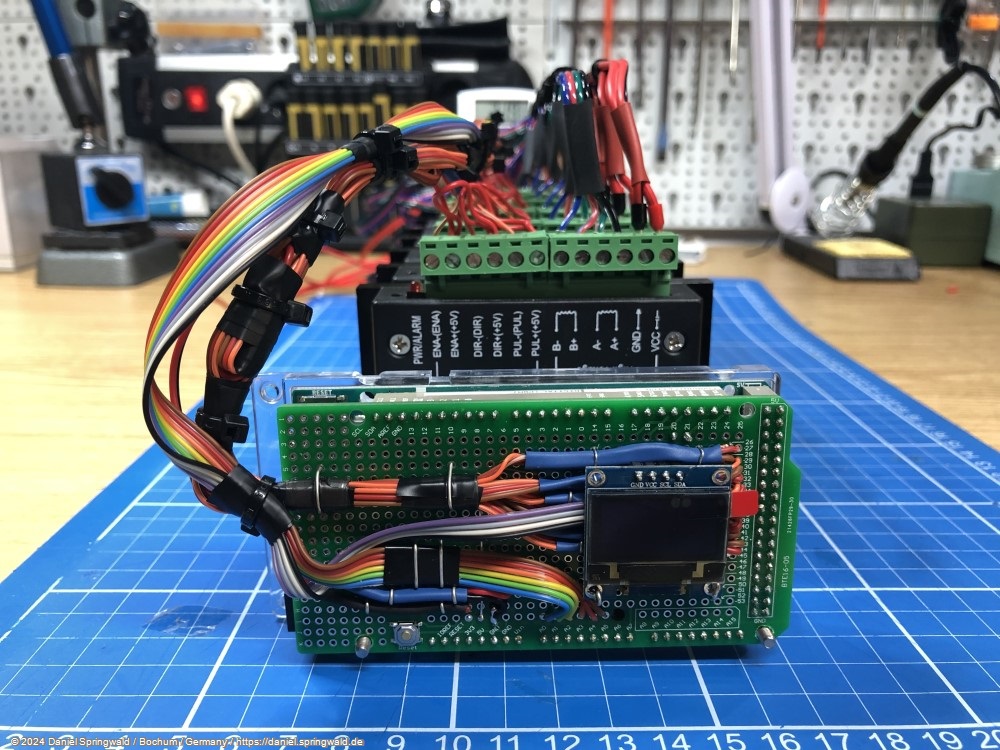
Hauptsächlich besteht der neue Controller aus einem Arduino Due und 6 Schrittmotor Endstufen. Der Arduino kostet aktuell ca. 40 € und die Endstufen jeweils nur knapp 10 €.
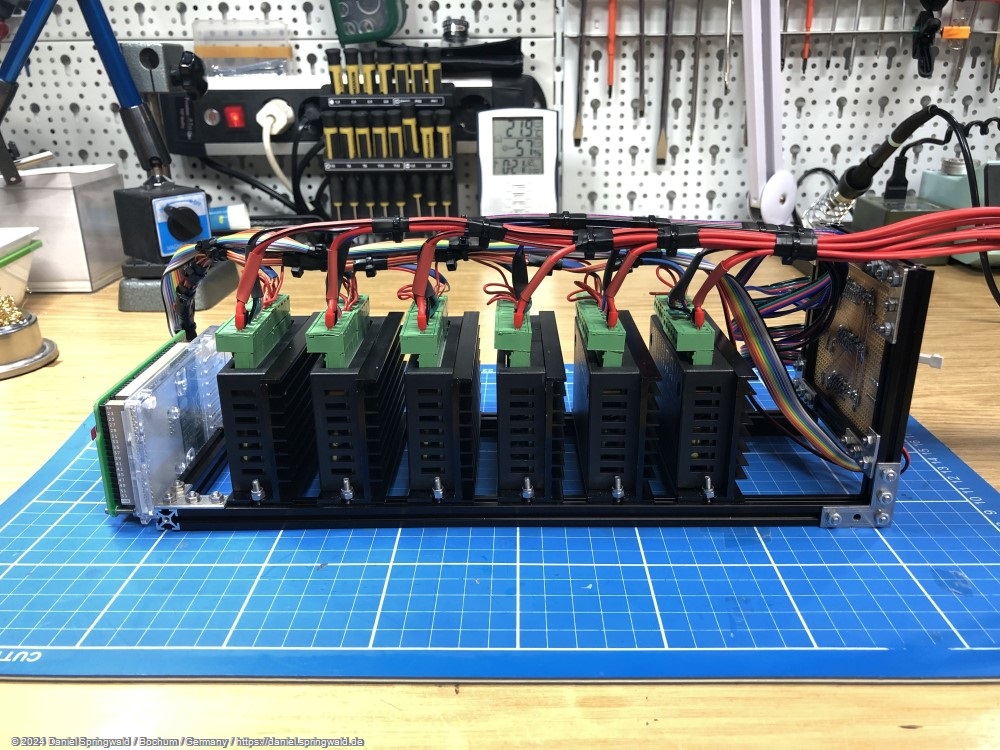
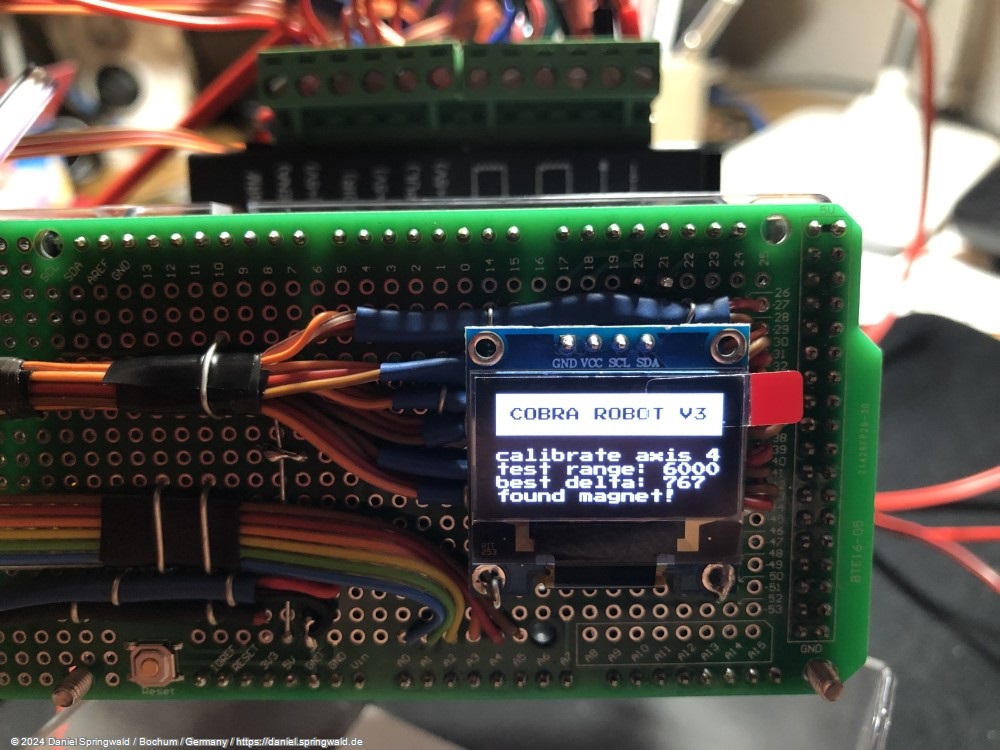
Vorn am Arduino habe ich noch ein kleines OLED Display angebracht, um den jeweiligen Zustand und Diagnose Informationen anzeigen zu können.
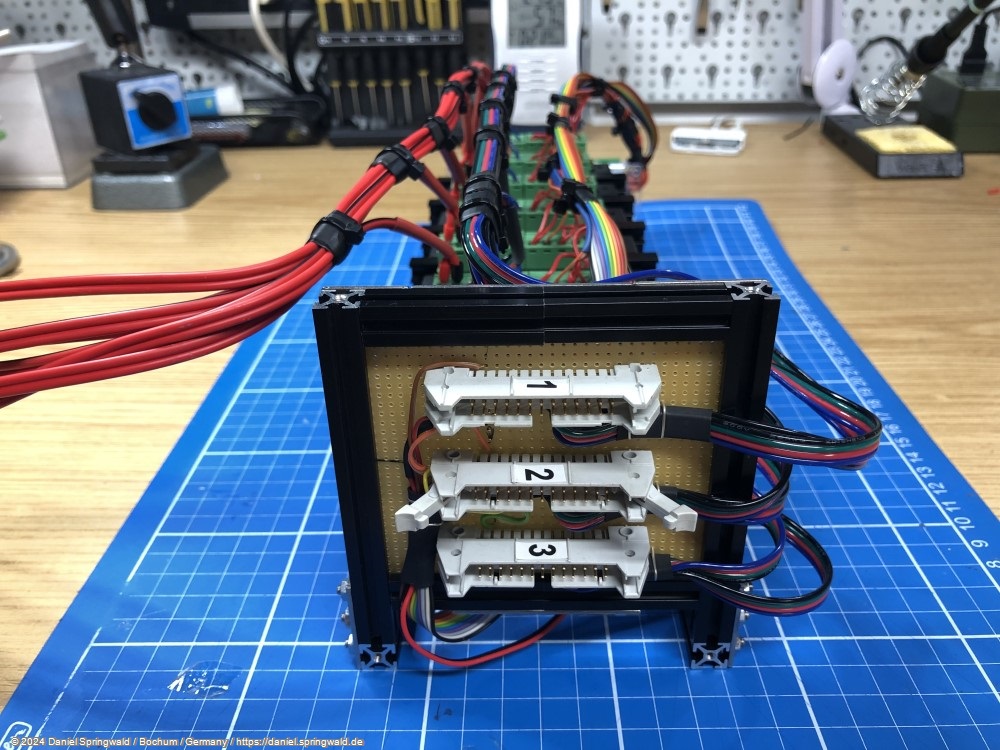
Hinten befinden sich die Anschlüsse für die Original Cobra RS Kabel - diese habe ich nämlich so belassen, wie sie ursprünglich waren.
Das ist jetzt alles schon deutlich kleiner uns leichter, als die Original Controller Box. Fairer Weise muss man aber natürlich noch erwähnen, dass das Netzteil auf den Fotos noch nicht zu sehen ist 😉.
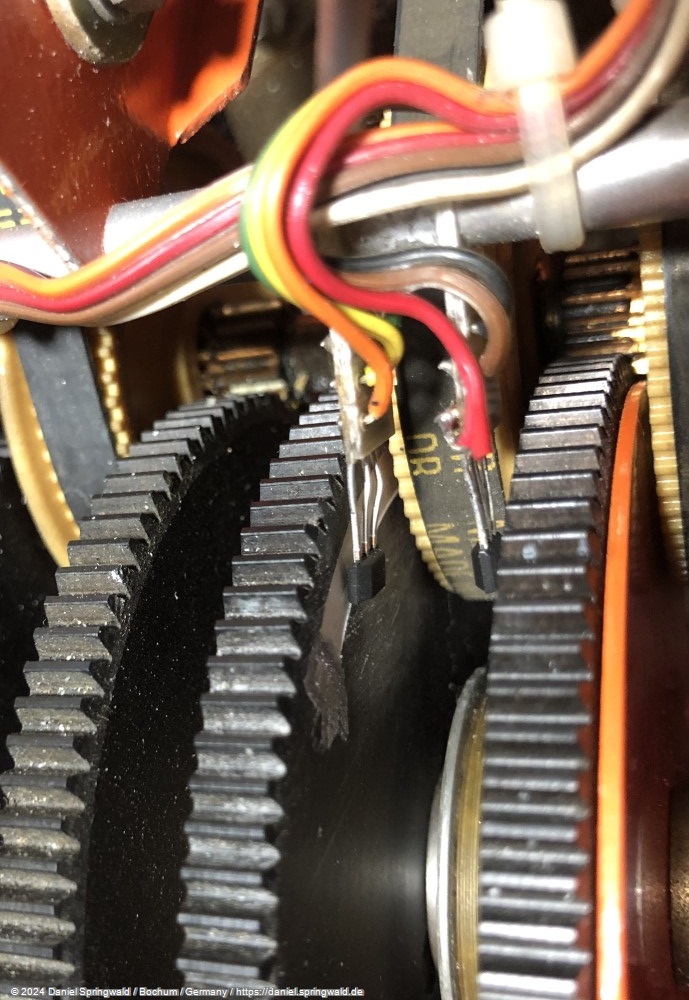
Umrüstung der End-Stop-Sensoren
Und wenn wir schon beim Verbessern sind, können auch gleich die Endstop Sensoren für die Eichfahrt des Roboter Armes von optischer Reflexion auf Magnete und Hall Sensoren umgestellt werden.