Daniel
Daniel show english version
show english version 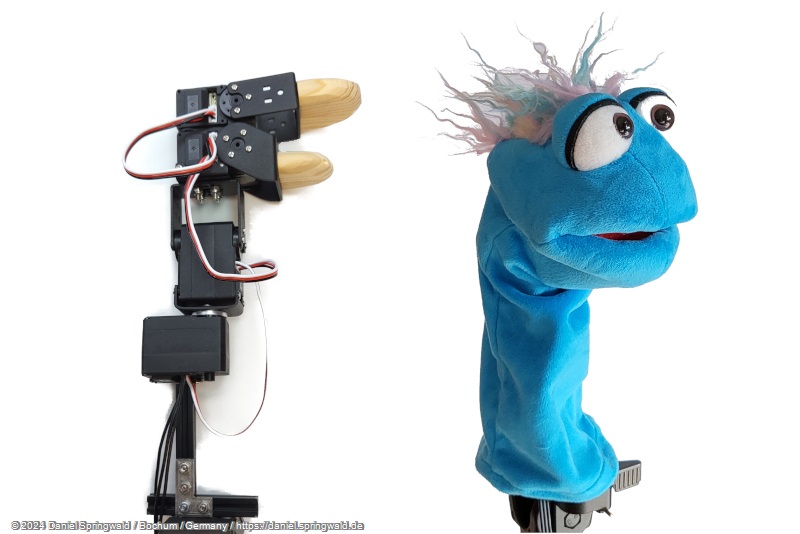
Neben dem animatronischen Grogu ist ein weiteres Projekt, das ich mit der Open Source Software Animatronic Workbench in Angriff genommen habe, ein animatronisches Puppenspiel.
Die Idee
Die grundsätzliche Idee ist, Handpuppen zu verwenden, ohne diese anpassen zu müssen.
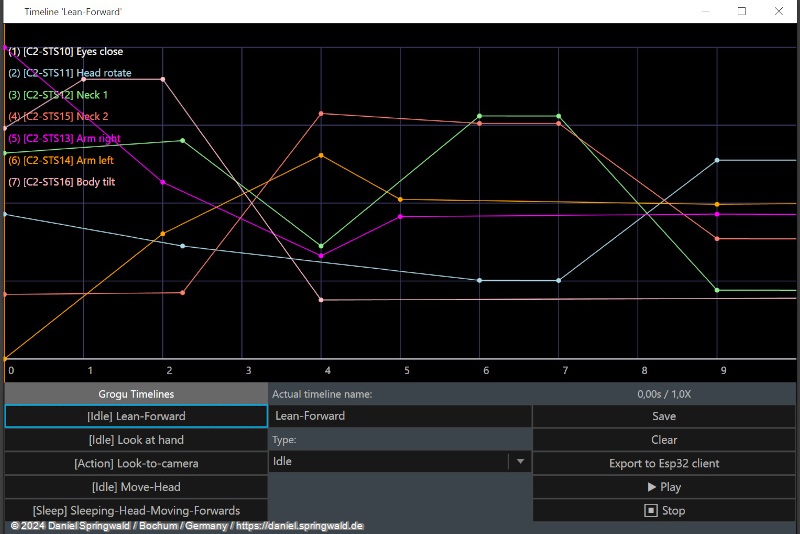
Dazu werden die Puppen mit einem Gestell ausgestattet, das die Bewegung der Puppe steuert. Die Form entspricht dabei ungefähr einer menschlichen Hand, damit alles gut ineinander passt. Die Bewegungen werden dabei von einem ESP32 gesteuert und die Bewegungen mit der Animatronic Workbench erstellt.
Die Hardware
Als Servos verwende ich wie beim animatronischen Grogu STS Bus-Servos.

Zwei davon sind für die Auf/Ab-Bewegung des Kopfes und gleichzeitig das Öffnen des Mundes zuständig. Zwei weitere Servos werden zum drehen und neigen des Kopfes verwendet. Die Servos sind untereinander mit Standard-Servo-Verbindern verschraubt.
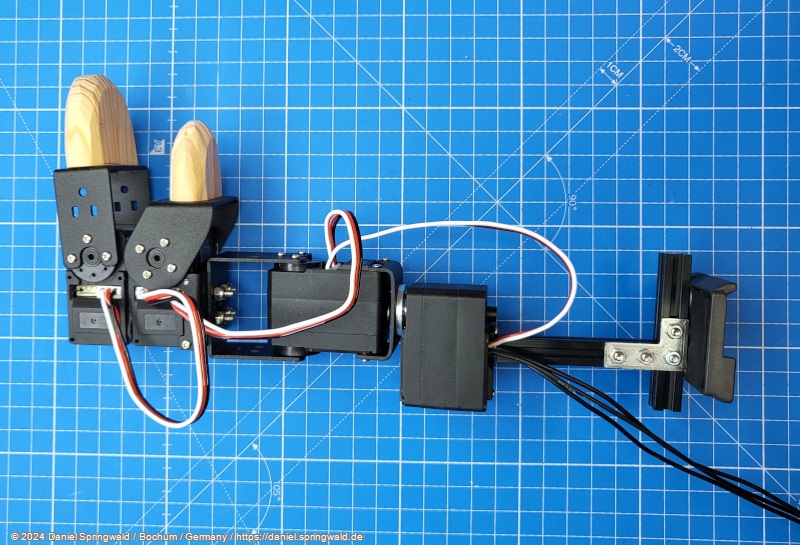
Die künstlichen Finger an den beiden oberen Servos sind aus Holz gefertigt.

Erster Test
Ein erster Test mit einer einfachen Bewegung des Kopfes und des Mundes sieht so aus: